血管介入手术机器人的应用背景
血管介入手术是一种普及程度较高的治疗手段。其具有在心血管,脑血管的介入成形术,内脏介入栓塞术,管内药物灌注术,血管造影术,外周血管成形术及电生理治疗术等多种应用。由于血管介入手术需求量巨大,而基层有资质的介入医生数量严重不足,这导致了一名介入医生往往会在短时间内进行多场介入手术。然而,血管介入手术需要全程在X光影像下进行。手术过程中会累积大量的辐射,相较于患者,介入医生由于手术场次较多,会受到更大的辐射威胁。为了减少辐射影响,介入医生会装备个人防辐射设备进行手术,例如防护铅衣,围裙,甲状腺防护罩,眼镜及手套。为了满足防辐射要求,这些防辐射设备都十分沉重,普遍重量在20千克以上,而介入医生需要全程站立完成手术操作。

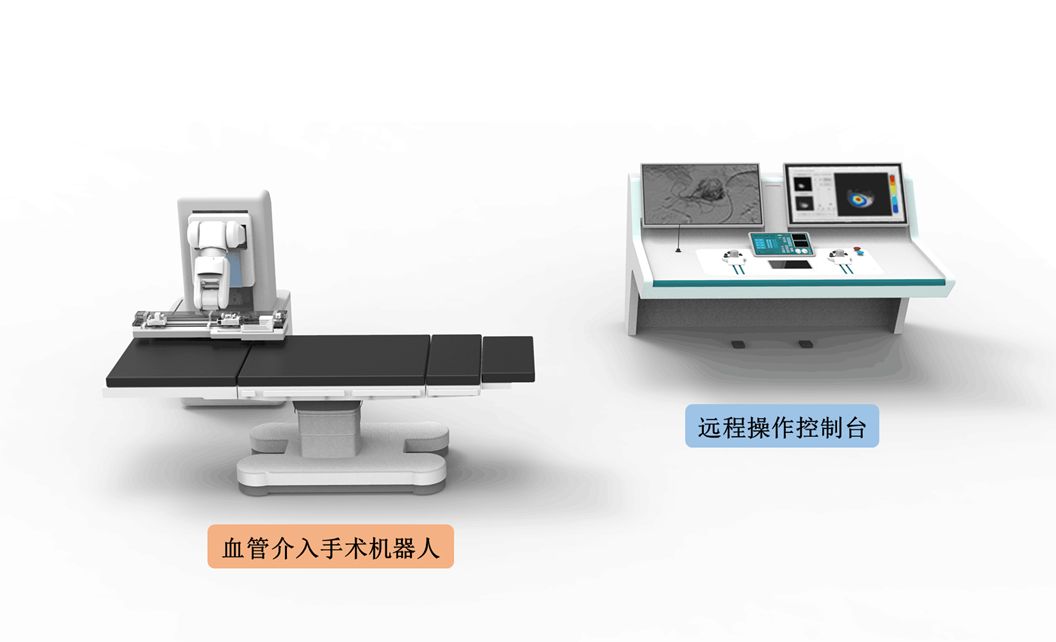
介入手术机器人系统以改善介入医生的工作环境,降低他们的工作强度,减少介入外科医生与患者在手术中受到的辐射剂量为目标,提供对导丝,微导管多介入器械的多自由度运动控制的同时,让介入医生在远离辐射区域的主控制台远程进行手术。与人工手动进行手术操作相比,机器人操作器可以达到更高的操作精度,实现更加稳定的操作动作,进而提升介入手术的实施水平,降低患者的手术并发症几率。
血管介入手术机器人系统的基本功能
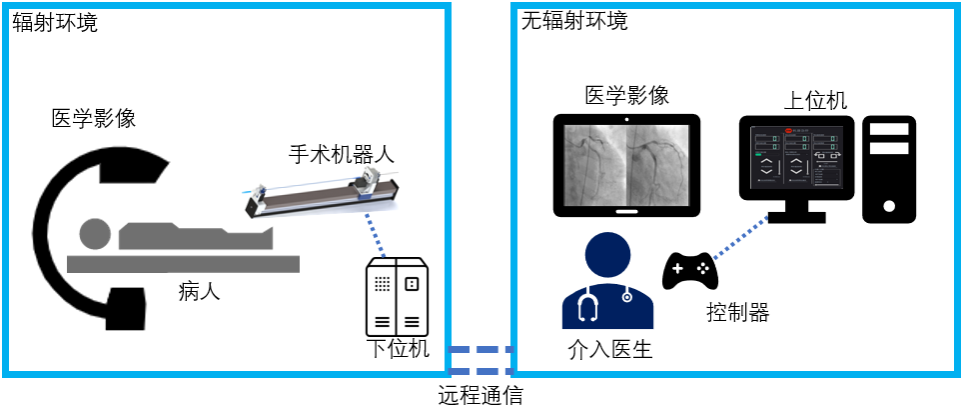
介入手术机器人系统通过上下位机结构,将介入手术的实施环境与介入医生的操作环境隔离开来。介入医生可以在操作室内通过影像与机器人的传感信息,远程掌握手术情况,并操作手术室内的介入手术机器人开展手术。

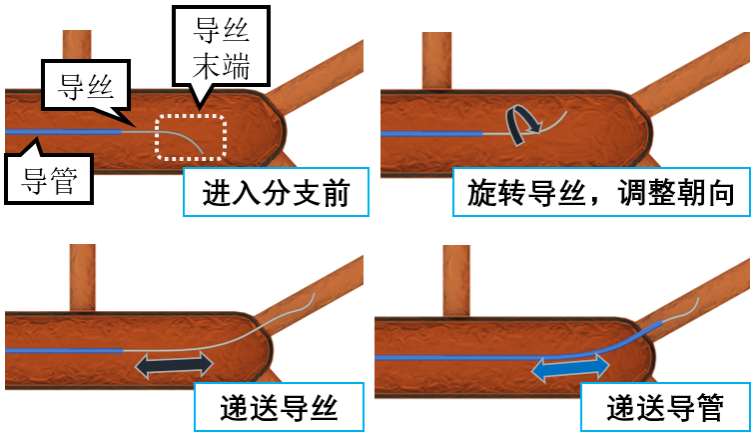
机器人系统可以同时控制多种器械,进行不同方向的运动。在医学影像的指导下,可以轻松通过控制导丝的旋转递送配合,完成介入器械在人体细分支血管内的超选递送任务。机器人操作手具有比人手更高的精度,灵敏度与稳定性,能够更加高效的完成手术任务。
血管介入手术机器人系统的亮点
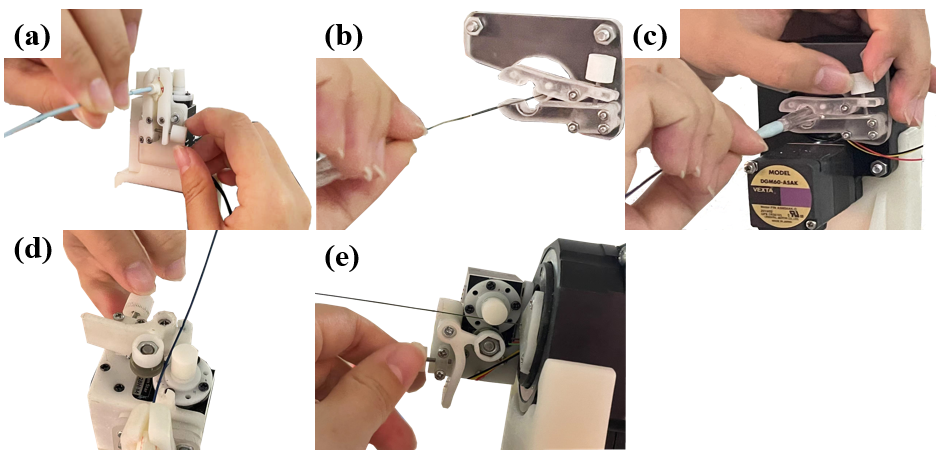
本项目提出了一种器械装拆方便,结构简化,体积小巧,维护简单的血管介入手术机器人。该设计旨在提升使用效率,适应实际手术中需要多次更换器械,装卸导丝导管注射药物的需求。安装介入器械仅需如下图所示的五个步骤,并且各个安装机构都配备了调节旋钮,方便快捷装拆介入器械的同时,还可以通过旋钮调整器械安装的松紧程度,以此兼容不同规格形状的介入器械,提高系统在实际临床中的泛用性。安装介入器械的步骤:(a) 安装血管鞘导管;(b) 将导丝推入引导通道;(c) 安装导管口;(d) 将导管夹紧在递送机构中;(e) 将导丝夹紧在递送机构中。
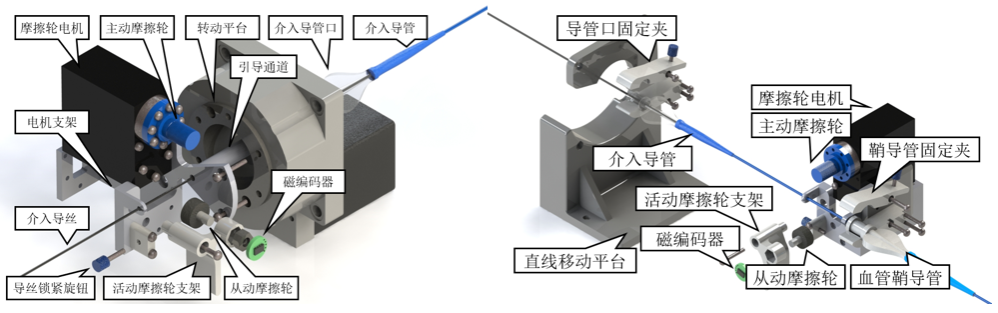
机器人系统采用了闭环递送方案,通过磁编码器采集器械的运动状况,相较于开环控制,极大提升了机器人系统的递送精度。通过传感器实测最小递送分辨率与递送精度可达0.1mm。如下是导丝递送机构与导管递送机构的局部爆炸视图。
机器人系统配备了完善的上位机人机交互程序,提供速度控制与位置控制两种方案,界面简洁直观,易于上手。上位机程序基于Qt开发,利用协程处理与下位机的通信,可支持密集的IO并发,软件运行速度快,通讯稳定性与效率高。上位机还配备了可自主定义的手柄控制模块,可以使用商用或自主开发的专用控制器对机器人进行控制。

